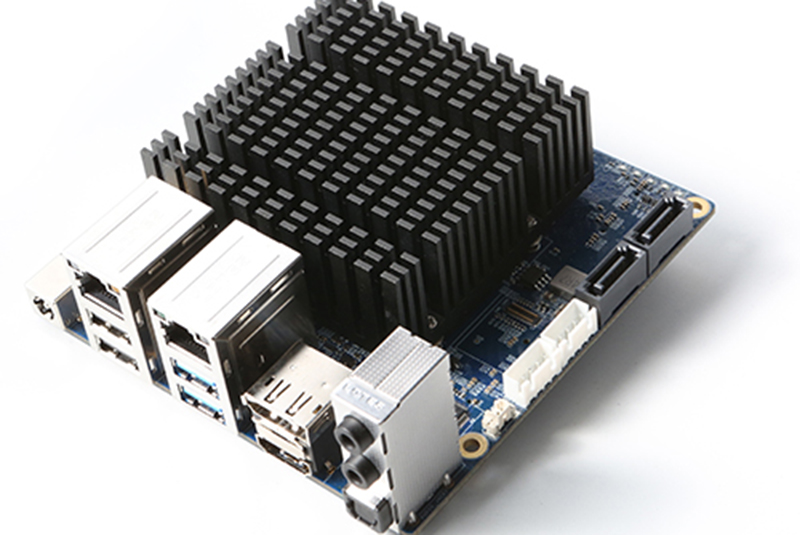
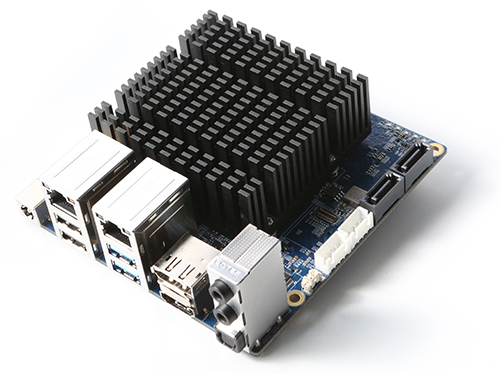
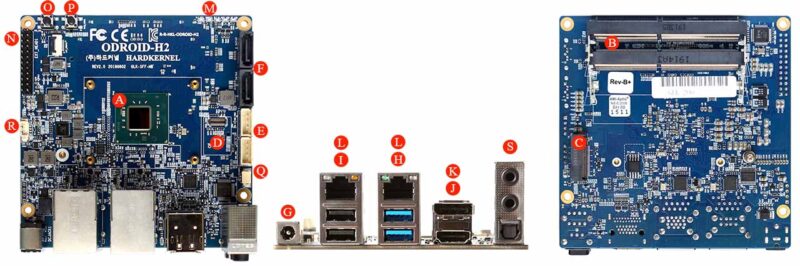
The ODROID-H2 is back, this time in a slightly upgraded form - named aptly, the ODROID-H2+! Accordingly the board revision code is REV-B+ (while the previous production batch was REV-B).
[ Fig. 01 ]
We announced the original ODROID-H2 back in November 2018, as a new generation of single board computer (SBC) - an x86 device. Despite its success we could not ship enough of them to satisfy the demand, caused due to the supply shortage of the Intel Gemini Lake J4105 CPU.
Fortunately, early this year, Intel started offering a slightly upgraded CPU, the Celeron J4115 for small manufacturers like us. We therefore expect that most of the existing parts supply problems will be resolved. Some specs can be found at https://bit.ly/2BXZHTb.
In addition to the CPU upgrade, we incorporated an enhanced Ethernet controller and RJ45 jacks, to support a much faster 2.5 GbE network. It employs a new NIC built around the RTL8125B chipset. However, for the moment, it requires users to manually install the relevant driver, since the upstream kernel still does not have the needed patch.
We have also increased the number of GPIO pins from 20 to 24 to add USB 2.0 and HDMI CEC signals. If you want to use the CEC function, you will need to buy a 3rd party CEC adapter board, like for instance this one: https://bit.ly/31NQGaf.
Finally we also changed the 12V SATA power circuit to improve the suspend-resume power control sequence of 3.5” HDDs.
Setting aside the differences between the ODROID-H2 and the ODROID_H2+, they are software compatible, with the same board dimensions and overall configuration. Everything you do on the ODROID-H2 from an hardware viewpoint, can be done exactly the same way on the ODROID-H2+, including converting the M.2 NVMe slot to PCIe2 x4 with a 3rd party adapter cable, connecting the H2+ to a 1 Gbe or 2.5 Gbe switch or other SBC or PC NIC, using the GPIO, etc. The ODROID H2+ just happens to offer more!
We expect to manufacture the ODROID H2+ without interruption of the CPU supplies.
The ODROID H2+ can now be ordered at https://www.hardkernel.com/shop/odroid-h2plus/, or other vendors close to your region. The slight price increase, compared to the ODROID-H2, is commensurate with the hardware upgrades and enhanced utility.
Setting up the ODROID-H2+: Installing the H2+ NIC Driver
July 1, 2020By JoshuaTutorial, ODROID-H2+
The original H2 and H2 REV.B carried two 1GbE NIC whose driver is included in both Windows 10 and recent Linux distributions. On the other hand the ODROID H2+ is equipped with two 2.5GbE NIC based on the Realtek 8125B chipset. This chipset is rather recent and its support in Windows 10, while present, is lackluster and even non-existing on many recent Linux distributions.
So as of this writing (June 2020) and in both cases, Windows 10 and Linux, you have to manually install the Realtek 8125B driver after you have installed the operating system. There is no doubt that the driver will end up in the upstream OSes at some point, but for now you have to install the driver yourself. It’s a rather simple affair anyway.
Requisites
This page assumes that you have an Internet connection via wireless or cellphone hotspot. In both cases, temporarily plugging in a USB wifi adapter, such as the ODROID 300Mbps.
If you do not have a wireless network or wifi adapter available, you can still reach the Internet via phone USB tethering. If you are going to use phone USB tethering, follow the instructions at the bottom of this page and then come back here.
For Linux it is a good idea to plug in the wireless thumb at OS install time so that you can connect to the wireless network while installing and then update the installation before installing the driver.
If you have a phone hotspot or phone USB tethering, check the section Connecting to Internet if you are not sure about how to connect with your phone.
If you cannot connect your ODRIOD-H2+ to the Internet via wireless, hotspot or tethering, you can download the necessary files on another PC, copy them to a USB drive and then plug that USB key into the H2+. See section Installing without Internet at the bottom of this page (Linux). For Windows, just copy the installer and run it as described below.
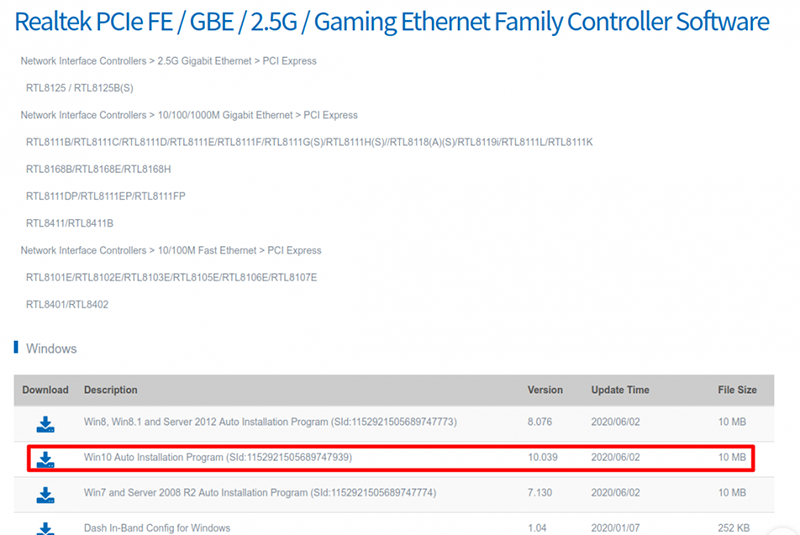
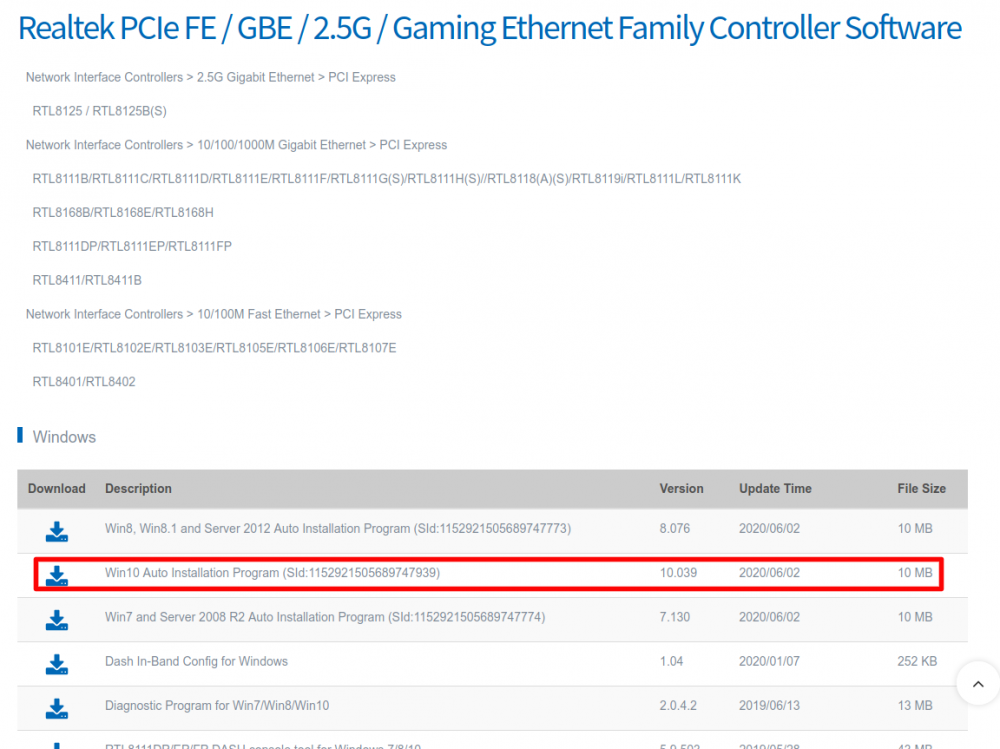
Download Win10 Auto Installation Program (Sid:1152921505689747939):
Realtek Download Page
Unzip the archive, run the installer following the instructions. Once the installation is completed, you can check for the presence of the two NICs in Settings looking for View Network Connections. If they do not appear, reboot and go back to Settings afterwards. If you want to let the connection(s) use DHCP, you have nothing more to do. You’re done.
Linux
There are at least two ways you can install the Realtek 8125B driver:
Download the .deb package Hardkernel prepared and install it. This is GUI-based and perfect for users not confident enough with the console. This method only works for Debian-based Linux distributions, such as Ubuntu and many others. If you are not using a Debian-based Linux distribution, you have to manually install the driver. We are not as of this writing providing the package in other formats, i.e. RPM file.
Download the driver source code, build it and install it. For users used to do such manual builds, it is quite easy
Installing the .deb
Download the package file from there: https://github.com/awesometic/realtek-r8125-dkms/releases/download/9.003.05-1/realtek-r8125-dkms_9.003.05-1_amd64.deb
Wait for the download to complete and then go to your Downloads folder. If you are using a Debian-based distribution that includes the GUI for installing packages, like Ubuntu 20.04 for instance, double-click on the downloaded package and click Install Package in the package window that just opened, and install.
Using the GUI-based connection settings window, click Add Connection (or equivalent) and configure the NIC(s) at your convenience. If Add connection does not show any Wired Connections, reboot and try again. If the connections still do not show up go to the Troubleshooting section.
Manual Installation
In a terminal console type the following commands:
$ cd ~/Downloads
$ wget https://github.com/awesometic/realtek-r8125-dkms/archive/master.zip -O realtek-8125-dkms.zip
$ unzip realtek-r8125-dkms-master.zip
$ cd realtek-r8125-dkms-master/
$ sudo ./autorun.sh
If you do not want to use wget use whatever command you prefer (i.e git clone).
After executing these commands, you should have the NIC available for configuration using the Network Manager or equivalent.
If you want to know what the autorun.sh does before executing it, just open it in your favorite text editor (vim, pluma, nano, etc.)
You can also find the REALTEK_README.txt into the folder providing additional information.
Troubleshooting
This section provides tips and tricks to troubleshoot your Linux configuration.
Are you actually using an ODROID-H2+?
This one is for users owning both H2 and H2+ and installing in the middle night without food or coffee The two models have essentially the same looking board. A good trick is to put a sticker somewhere, i.e. on the top of a RJ45 plug to distinguish them. Other a quick way when running it is to use lspci to make the distinction:
On H2+:
How to check that the two NIC are “known” to the Network Manager?
You can use ip a:
$ ip a
1: lo: <LOOPBACK,UP,LOWER_UP> mtu 65536 qdisc noqueue state UNKNOWN group default qlen 1000
link/loopback 00:00:00:00:00:00 brd 00:00:00:00:00:00
inet 127.0.0.1/8 scope host lo
valid_lft forever preferred_lft forever
inet6 ::1/128 scope host
valid_lft forever preferred_lft forever
2: enp2s0: <NO-CARRIER,BROADCAST,MULTICAST,UP> mtu 1500 qdisc fq_codel state DOWN group default qlen 1000
link/ether 00:e0:4c:68:00:09 brd ff:ff:ff:ff:ff:ff
inet 192.168.1.161/24 brd 192.168.1.255 scope global dynamic noprefixroute enp2s0
valid_lft 86370sec preferred_lft 86370sec
inet6 fe80::39fe:8b36:f3ec:fe24/64 scope link noprefixroute
valid_lft forever preferred_lft forever
3: enp3s0: <NO-CARRIER,BROADCAST,MULTICAST,UP> mtu 1500 qdisc fq_codel state DOWN group default qlen 1000
link/ether 00:e0:4c:68:00:0a brd ff:ff:ff:ff:ff:ff
In the listing above, the first NIC appears as enp2s0, its links are up and it is configured with a static IP. The second NIC is not currently connected.
What do I do if the NIC does not show up after installing the driver?
Check whether or not the r8125 module is loaded using lsmod:
$ lsmod | grep r8
r8125 147456 0
r8169 90112 0
If the line r8125 does not show up, try to load it with modprobe:
$ modprobe r8125
If no error is reported, the module should be loaded, call lsmod | grep r8 again to double check. In theory, you only have to do so once.
If errors are reported then it all depends on the nature of error and if you are stuck, your best bet is Google or Bing, and then if still stuck your next step is the ODROID forums or any good Linux forums.
How do I configure the two NIC?
You can use the Settings / Network or Connections GUI window. You can also use the console ncurses-based nmtui (google or binge for “nmtui howto”).
How do I check that a H2+ NIC is configured to 2.5 GbE?
One way it to use ethtool:
$ sudo apt install ethtool
.../...
$ ethtool enp2s0
Settings for enp2s0:
Supported ports: [ TP ]
Supported link modes: 10baseT/Half 10baseT/Full
100baseT/Half 100baseT/Full
1000baseT/Full
2500baseX/Full
Supported pause frame use: Symmetric Receive-only
Supports auto-negotiation: Yes
Supported FEC modes: Not reported
Advertised link modes: 10baseT/Half 10baseT/Full
100baseT/Half 100baseT/Full
1000baseT/Full
2500baseX/Full
Advertised pause frame use: Symmetric Receive-only
Advertised auto-negotiation: Yes
Advertised FEC modes: Not reported
Speed: 2500Mb/s
Duplex: Full
Port: Twisted Pair
PHYAD: 0
Transceiver: internal
Auto-negotiation: on
MDI-X: Unknown
Cannot get wake-on-lan settings: Operation not permitted
Current message level: 0x00000033 (51)
drv probe ifdown ifup
Link detected: yes
Installing without Internet
You can manually install the realtek-r8125 DKMS without an Internet connection at the time of installation. Follow these steps right after the OS has been installed.
Using the USB installation media as a apt repository
Since there's no Internet after installing the OS, you can't fetch the remote repositories. But you can use the contents of the installation media as a package repository so that you can install the necessary packages. Once you insert again the USB installation media, it will mount that under /media/user-name directory. You need to unmount that and mount again to the /media/cdrom directory.
The installation media is not recognized by the specific device node every time. So to mount the proper block device where your installation media, enter the following command.
Then set the mounted partition as an apt repository.
$ sudo apt-cdrom add -d /media/cdrom -m
Using CD-ROM mount point /media/cdrom/
Identifying... [262d29a6a66e8f1bebc790a773ce80ec-2]
Scanning disc for index files...
Found 4 package indexes, 0 source indexes, 0 translation indexes and 1 signatures
This disc is called:
'Ubuntu 20.04 LTS _Focal Fossa_ - Release amd64 (20200423)'
Copying package lists...gpgv: Signature made ---- -- -- (-)
gpgv: using RSA key D94AA3F0EFE21092
gpgv: Good signature from "Ubuntu CD Image Automatic Signing Key (2012) <cdimage@ubuntu.com>"
Reading Package Indexes... Done
Writing new source list
Source list entries for this disc are:
deb cdrom:[Ubuntu 20.04 LTS _Focal Fossa_ - Release amd64 (20200423)]/ focal main restricted
Repeat this process for the rest of the CDs in your set.