

Vamos a aprender a usar la salida GPIO, la entrada IRQ y el reloj del sistema con un módulo de medición de distancias por ultrasonidos. Ten en cuenta que el sensor de distancia es un elemento adicional que es imprescindible. (https://wiki.odroid.com/odroid_go/arduino/31_ultrasonic_distance_meter).

Requisitos
Asegúrate de contar con estos productos:
- ODROID-GO
- Módulo de alcance ultrasónico HC - SR04
- Cables Jumper y una placa de pruebas completa o de medio tamaño
- Una batería auxiliar si lo vas a transportar
- Este módulo necesita 5V de potencia de entrada, pero el ODROID-GO genera 3V para el pin de alimentación (# 6) en sus pines cabecera. Por lo tanto, es necesario utilizar el pin VBUS USB de 5 V (# 10) con una fuente de alimentación USB externa..
- Como alternativa, puedes usar un convertidor DC-DC progresico y un conmutador de nivel.
- Un cable microUSB
También deberás configurar el entorno de desarrollo para Arduino en tu sistema.
Configuración del hardware
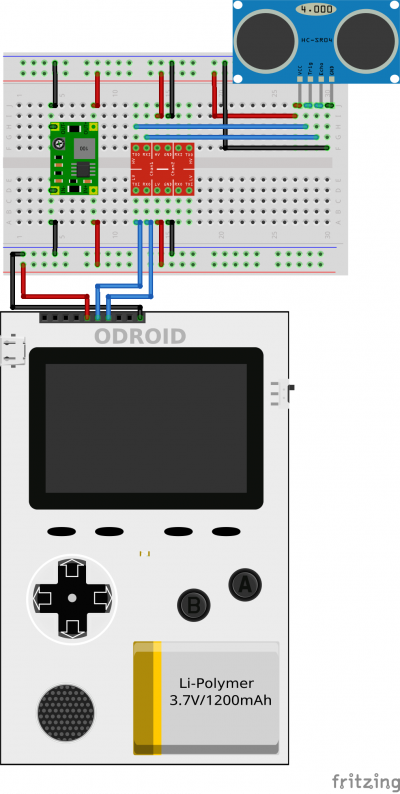
Consulta la Figura 2 cuando configures tu hardware. Nosotros usamos los siguientes componentes:
- Sensor ultrasónico: HC-SR04
- Convertidor DC-DC 3V a 12V (configurado a 5V por ahora): MT3608
- Convertidor de nivel lógico: BSS138
- ODROID-GO: fritzing_odroid-go.fzpz
- Convertidor Buck DC-DC Mini-360: mini-360_dc-dc_buck_converter.fzpz
- HC-SR04: hc-sr04.fzpz
A continuación, descarga el archivo de ejemplo Fritzing de odroid-go-ultrasonic-sensor.fzz.
Importar y compilar, cargar a ODROID-GO
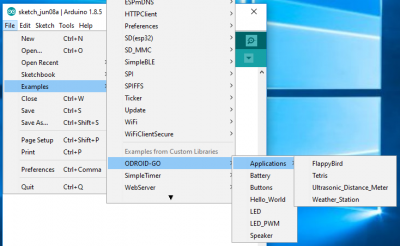
Haz clic en el menú Files → Examples → ODROID-GO → Applications → Ultrasonic_Distance_Meter para importar y presiona CTRL-U para compilar/cargar.
La carga se habrá completado cuando veas el mensaje “Hard resetting via RTS pin…”.
Pruebas
Una vez finalizada la carga, ODROID-GO se reinicia automáticamente. La pantalla mostrará una distancia medida en pulgadas, unidades de cm cuando detecta un obstáculo delante del sensor ultrasónico. Si no se cumplen las condiciones de medición, como son una distancia demasiado larga o demasiado corta, el texto que se muestra en pantalla aparecerá en rojo. Si la medición es normal, el texto aparecerá en verde.
Be the first to comment