

You can build your own Network Time Protocol (NTP) server using GPS and PPS on your ODROID. This NTP server system gives you very accurate time which can be very useful for specific use cases. The atomic clocks in GPS satellites are monitored and compared to 'master clocks' by the GPS Operational Control Segment; this GPS time is steered to within one microsecond of Universal Time. Our GPS receiver provides 1 Pulse Per Second, or PPS, output signal but you need to do a bit of wire soldering to expose this pin. This pulse has a rising edge aligned with the GPS second, and is used to discipline local clocks to maintain synchronisation with Universal Time (UT). As a result, our local server can have a very accurate time with less than 10 microseconds of tolerance. Before you start, you will need to expose the PPS signal from the GPS receiver.
Exposing the PPS signal
First, disassemble the GPS module by removing the 4 screws on the back of the GPS module. They are covered by a sticker on the bottom of the receiver. You should find out where they are by rubbing along the sticker feeling for divots. There should be 2 at the top and bottom ends of the sticker. After find the screw holes, cut the sticker and detach the cut part to unscrew the 4 screws.




Uncover the module to reveal the PCB board, which is what you have to solder in order to expose the PPS.

This is a very important part of this guide, since you have to solder a jumper cable to a specific pin of the chip. The location of the PPS pin that we need to expose is shown in Figure 6. Be very careful not to create a short circuit.

If you've done so, you may clean up the cable as shown in Figure 7.

Next, we need to assemble and connect everything back together. Place The PCB back into the housing like before and screw the case back together again.


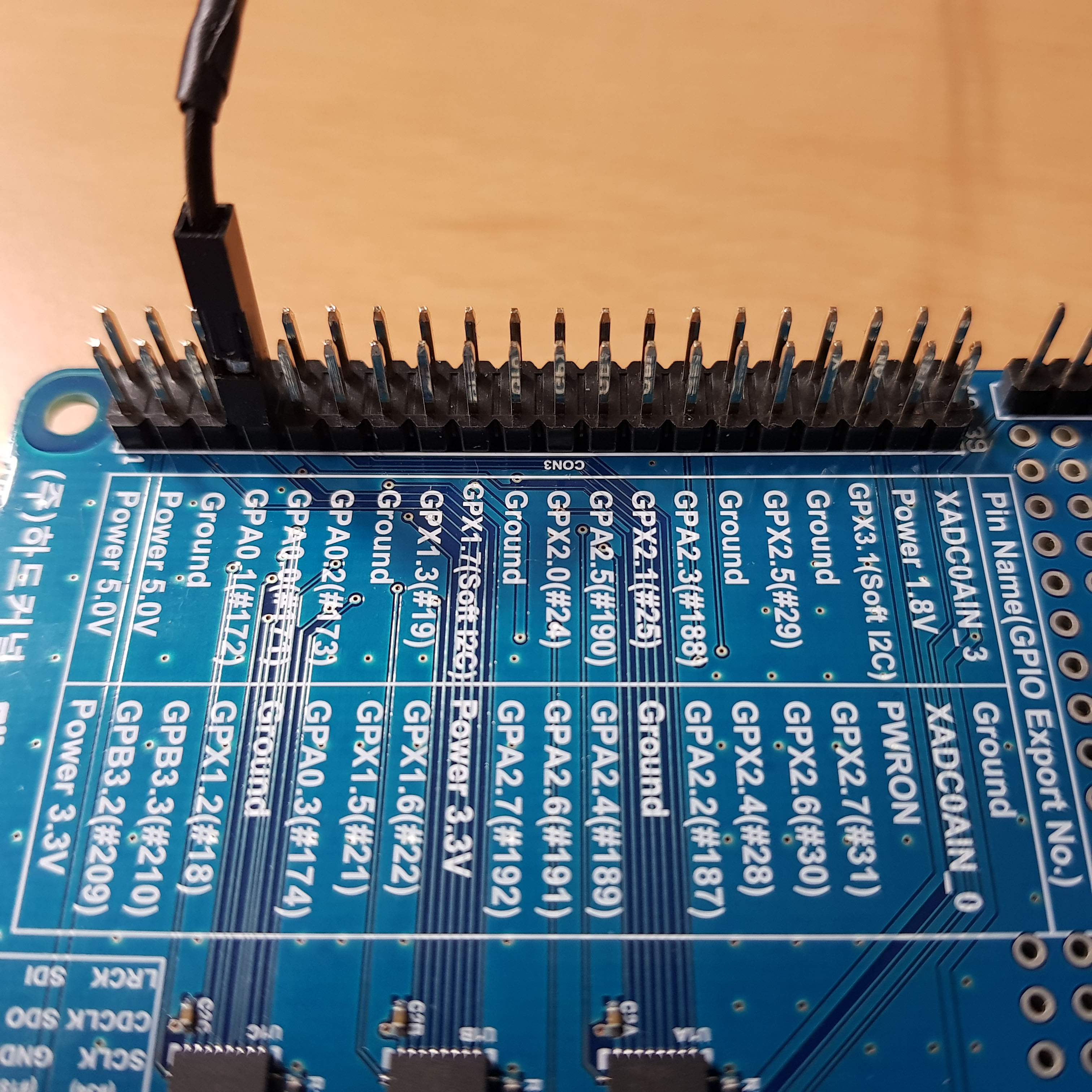
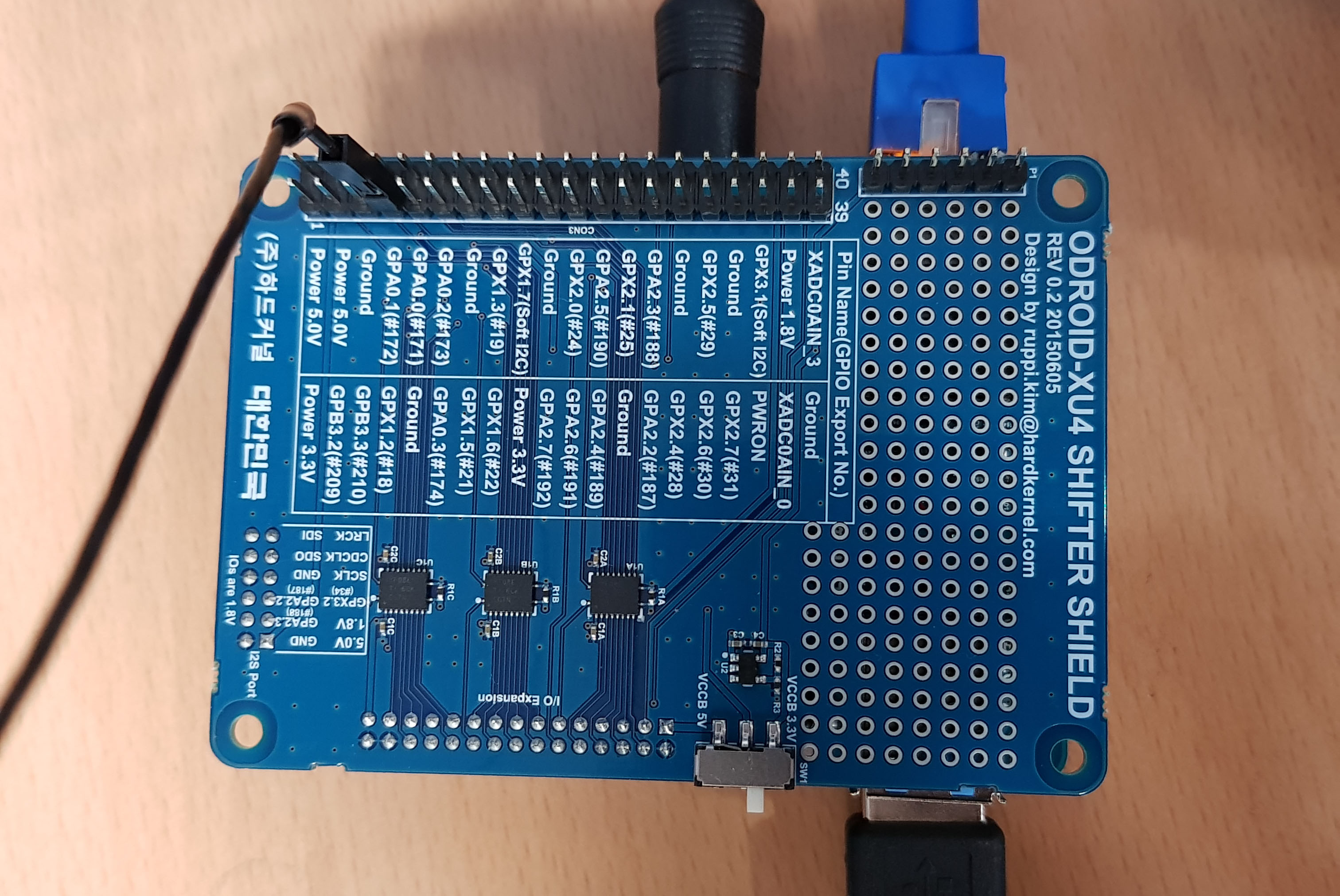
Connect the jump cable to the GPIO pin #18 of the XU4 shifter shield. Note that this needs to be the shifter shield to ensure that the voltage levels from the PPS pin match what is expected.
Connect the USB cable to the ODROID-XU4, and connect LAN, power cable as well.
Our mainline kernel doesn't fully support PPS from GPIO. Some required software setup should be done by building your own kernel on your ODROID-XU4. To start, prepare the Linux kernel source from Github, and install the needed tools to build a new kernel:
$ sudo apt update && sudo apt install git gcc g++ build-essential libncurses5-dev bcGet the Linux kernel source from our official Github repository at https://github.com/hardkernel/linux:
$ git clone --depth 1 https://github. com/hardkernel/linux.git -b odroidxu4-4.14.y odroidxu4-4.14.y $ cd odroidxu4-4.14.yAdd PPS support by editing the file arch/arm/boot/dts/exynos5422-odroidxu4.dts file to add a new device which gets PPS from GPIO #18:
$ vi arch/arm/boot/dts/exynos5422-odroidxu4.dtsAdd the following contents to the file:
dummy_codec : spdif-transmitter {};
/* add for pps-gpio */
pps {
compatible = "pps-gpio";
gpios = <&gpx1 2 GPIO_ACTIVE_HIGH>;
status = "okay";
};
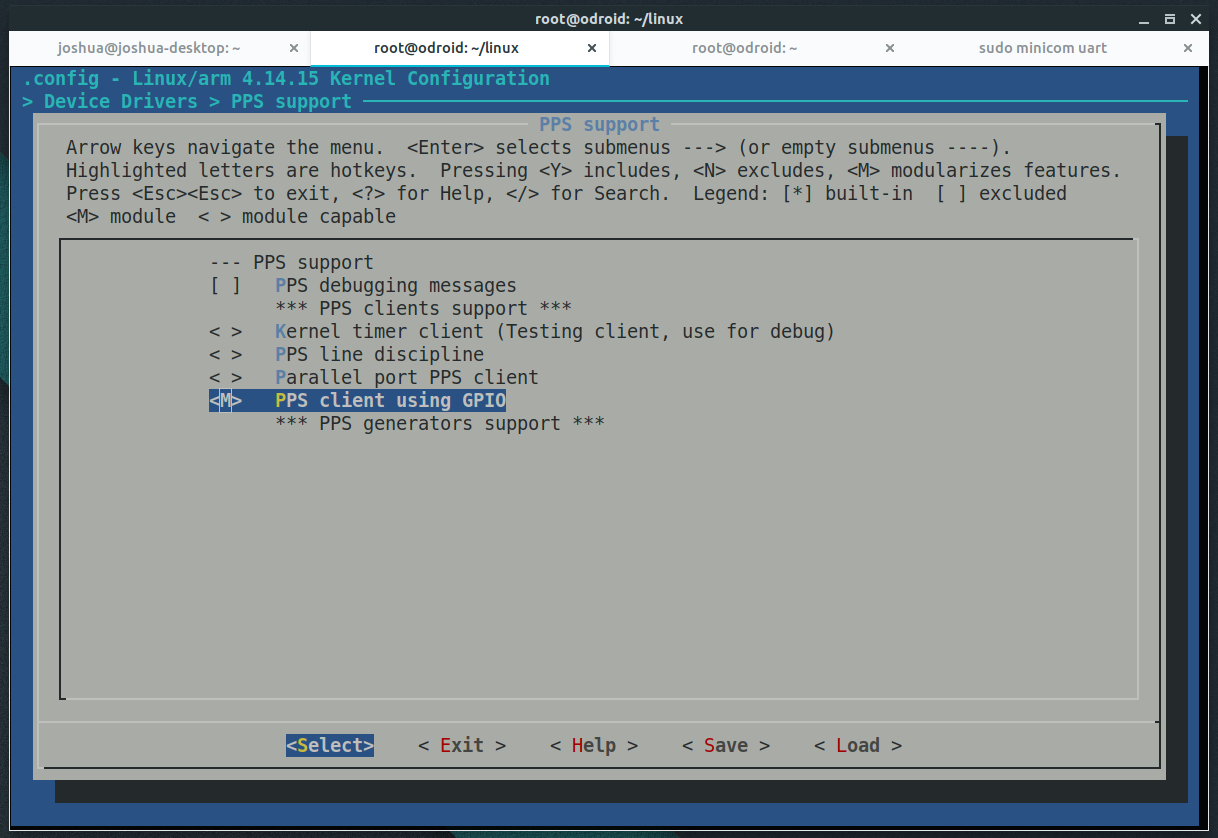
Next, make a custom menuconfig:
$ make odroidxu4_defconfig $ make menuconfigFind and enable with the space key, as shown in Figure 12, then save and exit.
If your custom settings works well, that would make new devices at /dev. Let's check them:
$ ls -al /dev/{ttyACM*,gps*,pps*}
crw------- 1 root root 248, 0 Jan 31 14:21 /dev/pps0
crw-rw---- 1 root dialout 166, 0 Jan 31 14:53 /dev/ttyACM0
lrwxrwxrwx 1 root root 7 Jan 31 14:21 /dev/ttyACM99 -> ttySAC0
If any one of the items in the above example above doesn't exist, you've done something wrong, and you should try to configure and build the kernel again. If all of them exist, make soft link files to use later:
$ sudo ln -sF /dev/ttyACM0 /dev/gps0
$ sudo ln -sF /dev/pps0 /dev/gpspps0
$ ls -al /dev/{ttyACM*,gps*,pps*}
lrwxrwxrwx 1 root root 12 Jan 31 15:50 /dev/gps0 -> ttyACM0
lrwxrwxrwx 1 root root 9 Jan 31 15:51 /dev/gpspps0 -> /dev/pps0
crw------- 1 root root 248, 0 Jan 31 15:50 /dev/pps0
crw-rw---- 1 root dialout 166, 0 Jan 31 15:50 /dev/ttyACM0
lrwxrwxrwx 1 root root 7 Jan 31 15:50 /dev/ttyACM99 -> ttySAC0
Make sure your result looks like the above example, theninstall the GPS related packages and configure them:
$ sudo apt install gpsd gpsd-clients $ sudo dpkg-reconfigure gpsdNext, you will need to test them:
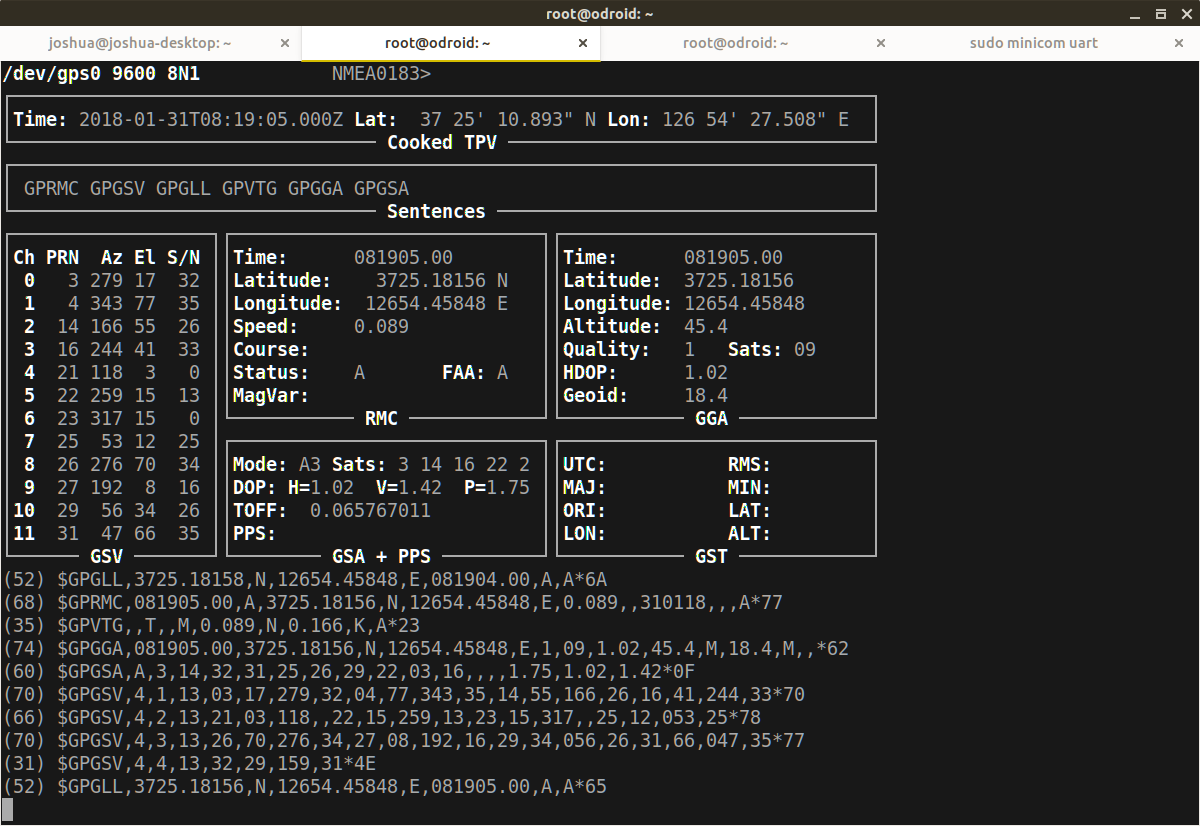
$ sudo gpsmon /dev/gps0An example screenshot using “gpsmon /dev/gps0” is shown in Figure 13. Wait more than 5 minutes to get the GPS information properly.
Next, install PPS tools, then test our ppstest on /dev/gpspps0:
$ sudo apt install pps-tools $ sudo ppstest /dev/gpspps0 trying PPS source "/dev/gpspps0" found PPS source "/dev/gpspps0" ok, found 1 source(s), now start fetching data... source 0 - assert 1517363638.431673232, sequence: 130 - clear 0.000000000, sequence: 0 source 0 - assert 1517363639.431676649, sequence: 131 - clear 0.000000000, sequence: 0A new row starting with “source 0 - assert …” will be added for every each second. Next, install the NTP service:
$ sudo apt install ntpEdit the /etc/ntp.conf file to use GPS/PPS. Backup the original file, and create a new configuration file using the options below:
$ sudo mv /etc/ntp.conf /etc/ntp.conf.bak $ sudo vi /etc/ntp.conf # /etc/ntp.conf, configuration for ntpd; see ntp.conf(5) for help # Drift file to remember clock rate across restarts driftfile /var/lib/ntp/ntp.drift # Server from generic NMEA GPS Receiver # server: NMEA serial port (/dev/gps0), mode 16 = 9600 baud + 2 = $GPGGA # fudge: flag 1 for use PPS (/dev/gpspps0), time2 for calibration time offset server 127.127.20.0 mode 18 minpoll 3 maxpoll 3 prefer fudge 127.127.20.0 flag1 1 time2 0.000 refid gPPSNote that the time2 parameter (0.000) is for editing time offset for calibrating the result time. Finally, restart the NTP service.
$ sudo service ntp restart
$ sudo service ntp status
● ntp.service - LSB: Start NTP daemon
Loaded: loaded (/etc/init.d/ntp; bad; vendor preset: enabled)
Active: active (running) since Wed 2018-01-31 17:44:58 KST; 3s ago
Docs: man:systemd-sysv-generator(8)
Process: 744 ExecStop=/etc/init.d/ntp stop (code=exited, status=0/SUCCESS)
Process: 754 ExecStart=/etc/init.d/ntp start (code=exited, status=0/SUCCESS)
CGroup: /system.slice/ntp.service
└─765 /usr/sbin/ntpd -p /var/run/ntpd.pid -g -u 111:115
Jan 31 17:44:58 odroid ntp[754]: ...done.
Jan 31 17:44:58 odroid systemd[1]: Started LSB: Start NTP daemon.
Jan 31 17:44:58 odroid ntpd[765]: proto: precision = 1.375 usec (-19)
Jan 31 17:44:58 odroid ntpd[765]: Listen and drop on 0 v6wildcard [::]:123
Jan 31 17:44:58 odroid ntpd[765]: Listen and drop on 1 v4wildcard 0.0.0.0:123
Jan 31 17:44:58 odroid ntpd[765]: Listen normally on 2 lo 127.0.0.1:123
Jan 31 17:44:58 odroid ntpd[765]: Listen normally on 3 eth0 192.168.100.28:123
Jan 31 17:44:58 odroid ntpd[765]: Listen normally on 4 lo [::1]:123
Jan 31 17:44:58 odroid ntpd[765]: Listen normally on 5 eth0 [fe80::4db2:ce0b:48f3:26af%2]:123
Jan 31 17:44:58 odroid ntpd[765]: Listening on routing socket on fd #22 for interface updates
Wait for about minutes for the GPS to stabilize, then check that you are getting an accurate time from the GPS/PPS. The PPS output is enabled only when it gets several stable satellite signals. You can see the results like below, Check that the “o” character exists before IP numbering and reach value is increasing up to 377.
$ ntpq -p
remote refid st t when poll reach delay offset jitter
==============================================================================
oGPS_NMEA(0) .gPPS. 0 l 1 8 377 0.000 0.008 0.002
$ ntptime
Check that estimated error is just 1 us(Microsecond).
ntp_gettime() returns code 0 (OK)
time de1bee1d.49adfb50 Wed, Jan 31 2018 16:26:21.287, (.287811636),
maximum error 2000 us, estimated error 1 us, TAI offset 0
ntp_adjtime() returns code 0 (OK)
modes 0x0 (),
offset -3.606 us, frequency 1.000 ppm, interval 1 s,
maximum error 2000 us, estimated error 1 us,
status 0x2001 (PLL,NANO),
time constant 3, precision 0.001 us, tolerance 500 ppm,
To view the original Wiki posting, please visit https://wiki.odroid.com/odroid-xu4/application_note/gpspps_ntp_server.
Be the first to comment